I'm Wells, 6 years of software development, Rails/React developer, National champion in electrical installations.
About
JHE-WEI, JHANG
- Nickname: Wells
- Location: Taipei
- I'm Wells, 6 years of software development, Rails/React developer, National champion in electrical installations.
I'm Wells, 6 years of software development, Rails/React developer, National champion in electrical installations.
- 12
Achievements
- 30
Projects
- 10
Customers
Work
Experience
Works
Works
Jul 2024
~Present
Backend EngineerShopline
- Develop features and troubleshoot production issues on a microservices system.
- Single-handedly owned the entire team's backend development and production troubleshooting for a quarter.
- Introduced OpenTelemetry (OTEL) to improve tracing efficiency across the microservices.
- Established team-wide agent skills to boost development and troubleshooting efficiency.
Jul 2022
~Jul 2024
Software EngineerCyberbiz
- Guide the team(5 members) to develop the project "OMO Assistant", which makes shops expand their business easily. It's used by 300+ branch stores now.
- Improve CI/CD workflow for large DB migration. Allow hotfix deployment during migrating.
- Handled server overload and 503 errors caused by POS devices batch-uploading offline invoices after reconnecting.
May 2020
~Present
Freelance Software DeveloperN/A
- Built TAIWAN Tech Uni sport registration system, which streamlines registration flow. from March 2024, it has finished 900+ registrations.
- Built Sketchup 3D rebar automatic build plugin. which helps the architect to place various rebars in columns, and calculate the amount of rebars. Estimated to save around 80% of the architect's modeling and calculation time.
Jan 2021
~Jul 2022
Part-Time Software EngineerAIHAO Information Company
- Resolve N+1 query problems, and speed up query performance.
- Upgrade RubyJobs Website(Ruby2.3/Rails4.2 ~> Ruby2.7/Rails6.1).
- Maintenance several Websites(ALPHA Camp, JARLL 讚爾藝術, 台灣醒報).
Jun 2020
~Jan 2021
Software Engineer & Co-founderHomie Studio Startup
- Implement “Shooly” Platform. which helps people find ideal technicians and dispatch to resolve their problems.
- Got a million Taiwanese dollars in financing.
Jan 2018
~Sep 2019
Electrical EngineerANIMATE ENGINEERING CO., LTD
- Assembling teaching materials for KNX smart home based on the 108 curriculum.
- Participating in the smart building project at National Taitung University.
- Participating in the smart home project at Yunlin-Chiayi-Nantou Regional Branch, Ministry of Labor.
- Participating in the smart classroom project at National Hualien Industrial Vocational High School.
- Participating in the smart farm project at Nantou Zhongpu.
Education
Background
Education
Education
2018
~2023
NTUSTBachelor Degree Program of Applied Science and Technology
- Bachelor of Applied Technology (Major in Computer Science).
- Won 10+ awards (President award, Technology award, Sport award).
- Tennis school team member.
2022
~2023
Hochschule EsslingenExchange Student in Informatik major
- Led the Team to Finish the Course Simulator Application Project
2014
~2017
National Hualien Industrial Vocational Senior High SchoolElectrical Engineering
- The 44th WorldSkills Abu Dhabi 2017 Medallion for Excellence
- The 44th WorldSkills Abu Dhabi 2017 National Competitor
- The 46th National Skills Competition Golden
Achievements
Achievement
National Competitor
- 2017 Shanghai WorldSkills Competition Invitational / Interior Wiring / World Gold Medal
- 44th Abu Dhabi WorldSkills Competition / Interior Wiring / World Champion
- 44th WorldSkills Competition / Interior Wiring / National Representative
Scholarship
- 2021 Foxconn Education Foundation Award
- 2021 Presidential Education Award
- Cathay Outstanding Scholar Program Special Merit Award
- 2020 NTUST Outstanding college Youth Award
University Competition
- 2020 National College Intelligent Innovation and Cross-Disciplinary Integration Creation Competition/ Sliver
- The 13th HIWIN robotic arm Competition
Tennis Competition
- 7th Place in the 111th National Intercollegiate Tennis Cup Northern Region Team Competition
- Easyoga Cup Zhongli Station Tennis Grading Tournament 2.5: Singles and Doubles Third Place
- 2nd Breakpoint Tennis Grading Tournament 2.0: Singles Champion
Speech Experience
- Coscup / Building 3D Models with Ruby / July 2022
- Coscup / TechGirl from NTUST / July 2022
- Delivered 4 speeches on 'Embracing Career with Technical Skills'
- Invited as a speaker for the Ministry of Labor's Skill Competition Promotion Event 'Rooting Career from the Bottom' / September 2021
- Invited to speak at the Southern Maker Base on 'Taking an Alternative Path'
- Invited as a commentator for the 48th National Skill Competition Northern Region Qualifiers in the field of Indoor Electrical Wiring / April 2019
- Invited as a commentator for the 47th National Skill Competition in the field of Indoor Electrical Wiring / August 2018
- Invited as a commentator for the 47th National Skill Competition Northern Region Qualifiers in the field of Indoor Electrical Wiring / April 2018
Skills
Skills
Web
Programming Language
Projects
Projects
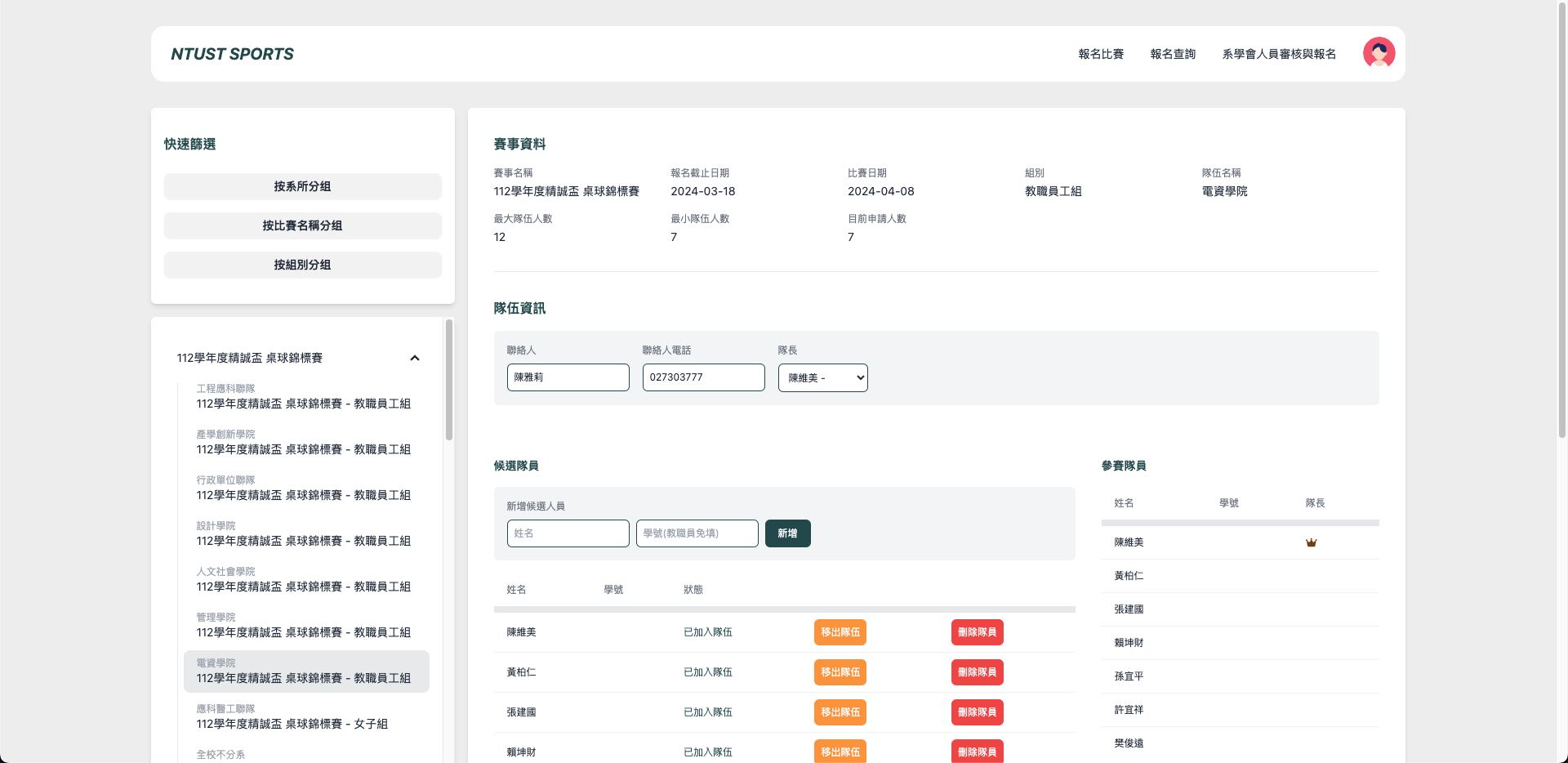
TAIWAN Tech Uni sport registration system,
Built TAIWAN Tech Uni sport registration system, which streamlines registration flow. from March 2024, it has finished 900+ registrations. Tech stack includes Rails, React, Esbuld, Dokku, Github Actions...

LINE Chatbot-NTUST Senior
NTUST Senior is a LINE chatbot designed specifically for new non-departmental students at National Taiwan University of Science and Technology (NTUST). Developed by myself to address the confusion faced by non-departmental freshmen every year, this project provides features such as course selection assistance, graduation requirements, and campus announcements. It is implemented using Rails.
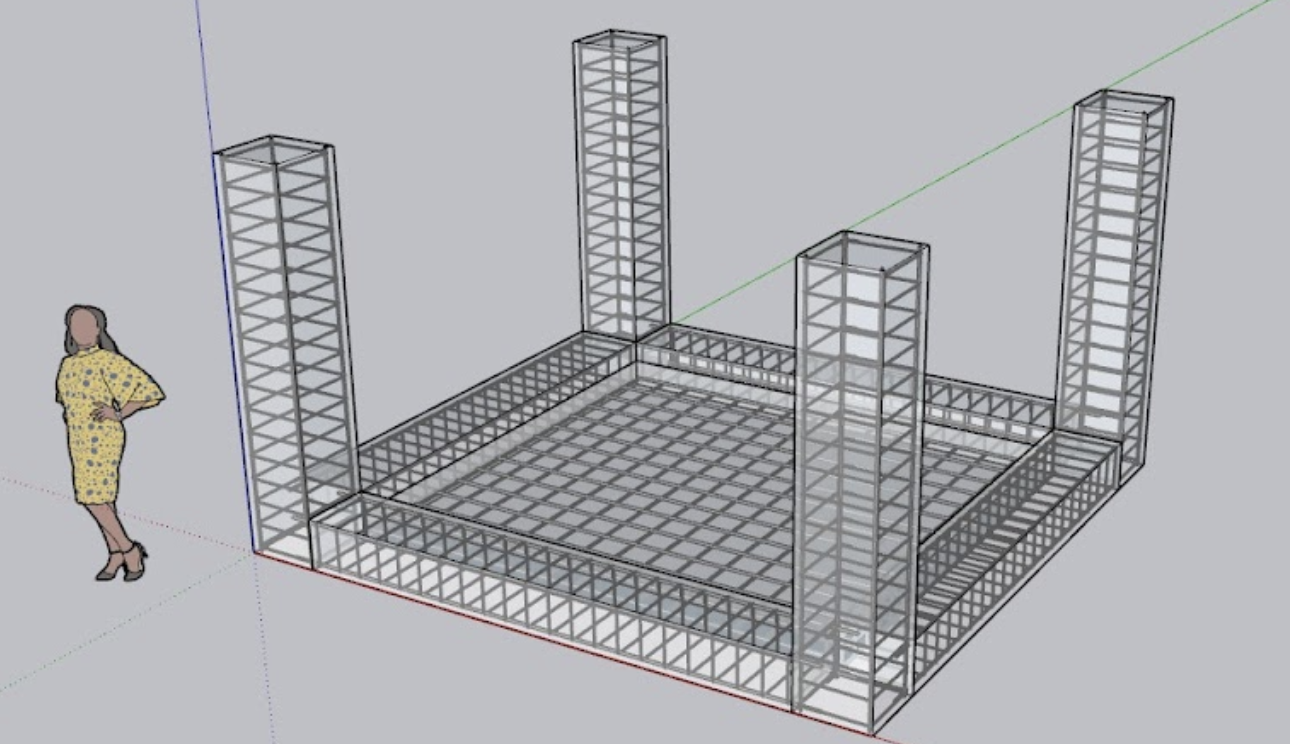
Sketchup Rebar Helper Plugin
Sketchup is a commonly used 3D modeling software in the architecture industry. For this project, the requirement is to automatically deploy reinforcement within the structural elements. In traditional cases, modelers have to manually calculate and construct sample reinforcement based on the dimensions, layers, and types of reinforcement required for the structural elements. They then repeatedly copy the sample reinforcement to specific locations, which is a repetitive and time-consuming task. With this plugin, however, by inputting parameters, the plugin can directly generate reinforcement that matches the structural elements. It is implemented using Ruby.
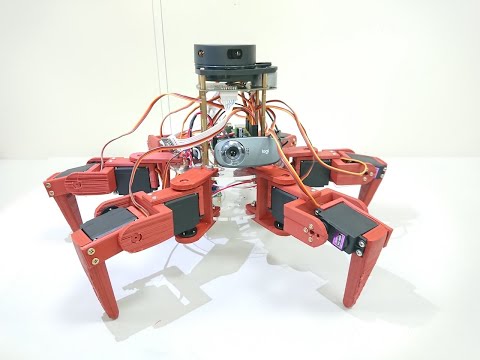
Hexapod Bionic Robot
This project is a reconnaissance robot designed for exploring indoor spaces and surveying partially collapsed buildings. To adapt to complex terrains, we chose a hexapod robot as the base, which offers greater advantages in overcoming terrain obstacles despite its slower movement speed compared to wheeled robots. The project utilizes reinforcement learning techniques to simulate various terrains on a computer, enabling the robot to automatically adjust its movement patterns based on the terrain. When used in disaster relief scenarios, the robot provides valuable insights into the interior of collapsed buildings. We have equipped the robot with an optical radar to collect data and generate a point cloud representation of the entire space. Additionally, for easier location of trapped individuals, the robot is equipped with a camera that utilizes YOLOv4 for real-time image recognition, facilitating search and rescue operations.